ADS-02:集合与布隆过滤器
集合的抽象数据类型
在计算机科学的底层数据结构设计中,集合(Set)作为一种核心的抽象数据类型,直接映射了经典数学理论中的集合概念。集合的本质被定义为一个由互异值组成的无序集合。在复杂的算法设计中,理解集合的数学性质是构建高效软件工程组件的基石。
数学中常见的集合具有明确的边界和内涵。为清晰展示数学集合的定义及其在程序逻辑中的映射,以下表格列举了典型的数学集合实例:
| 集合名称 | 数学表示与内容枚举 | 集合内涵描述 |
|---|---|---|
digits |
十进制基础数字集合 | |
evens |
10以内的正偶数集合 | |
odds |
10以内的正奇数集合 | |
primes |
10以内的素数集合 | |
squares |
10以内的完全平方数集合 | |
colors |
基础颜色域 | |
primary |
光学三原色集合 | |
secondary |
次级混合色集合 | |
| 实数域连续集合 | ||
| 整数域离散集合 | ||
| 自然数(非负整数)集合 | ||
| 不包含任何元素的空集 |
在基础的程序库设计中(如 C++ 的初始容器抽象),集合类通常仅支持底层的原子操作,例如添加元素、移除元素以及测试元素的存在性。然而,为了简化复杂计算几何或图论算法的开发,抽象数据类型必须提供更为丰富的高阶数学操作,包括并集、交集、差集、子集判断以及集合的相等性测试 。
C++ 运算符重载
在 C++ 语言的范式中,实现高阶数学集合操作的最佳实践是采用运算符重载。这种机制不仅提升了代码的直观可读性,还能在底层通过常量引用确保内存的极简开销与数据的安全性 。
集合关系运算符
集合的比较首先体现在相等性与差异性上。判断两个集合是否相等,在数学上的充分必要条件是两个集合互为子集。
1 | /* |
集合代数运算符
针对并集、交集和差集,C++ 接口设计利用算术运算符进行了直观的映射。并集操作将两个集合的元素合并,消除重复项;交集操作筛选出双边重叠的元素;差集操作则执行严格的剔除逻辑 。
1 | /* |
函数指针、泛型比较与冯·诺伊曼架构
在集合的底层实现中(例如基于平衡二叉树或哈希表),系统必须能够比较指定值类型的元素。对于诸如整数和字符串的内置类型,内置的 == 和 < 运算符已经足够。然而,工程实践中不可避免地会遇到用户定义的复合数据结构。由于这些复合类型未必重载了关系运算符,良好的软件接口设计需要允许客户端作为集合构造函数的一部分,主动注入自定义的比较法则 。
冯·诺伊曼架构
允许将“函数”作为参数传递给另一个“函数”,这一机制在 C 和 C++ 中通过函数指针实现。这一特性的存在,深深植根于现代计算机设计的基石冯·诺伊曼架构 。
冯·诺伊曼架构的核心突破在于提出了存储程序模型。在这一模型中,执行运算的指令代码与运算所处理的数据被统一存储在相同的物理内存中。这意味着,每一个 C++ 函数的机器指令流在进程的内存空间中占据着一个确定的物理地址。既然函数本质上是内存中的一段连续数据,高级语言便可以声明一个指针变量来存储这个起始地址,进而在运行时动态地跳转和调用这块内存区域中的逻辑 。
C++ 函数指针与泛型排序
理解了底层的内存模型后,C++ 的函数指针声明语法便显得顺理成章。以下声明方式展示了指针与不同类型函数的结合 :
| 声明语法 | 语义解析 |
|---|---|
int n; |
声明 n 为一个普通整型变量。 |
int *pn; |
声明 pn 为一个指向整型数据的指针。 |
int f(); |
声明 f 为一个没有参数且返回整型结果的函数。 |
int *g(); |
声明 g 为一个没有参数且返回整型指针的函数。 |
int (*fn)(); |
声明 fn 为一个指向函数的指针,该函数无参数且返回整型。 |
int (*cmp)(int, int); |
声明 cmp 为一个指向函数的指针,该函数接受两个整型参数并返回一个整型结果。 |
为了验证这一机制,我们可以构建一个基于 Template 的泛型排序函数。该算法采用选择排序的逻辑,通过动态注入的函数指针 cmp 来决定元素的相对顺序:
1 | /* |
在实际应用中,如果客户端希望按照字符串的长度对一个字符串向量进行排序,可以定义如下比较函数并将其作为参数传入:
1 | int lengthCompare(string s1, string s2) { |
为了兼顾不需要自定义比较法则的基础数据类型,接口层通常会提供一个名为 cmpfn.h 的默认模板文件。其导出了一个 operatorCmp 函数,默认回退到使用基础类型的 == 和 < 运算符进行判定,确保了集合框架的开箱即用性 。
集合的底层数据结构
现代软件工程库在实现集合这一抽象概念时,通常面临两种底层数据结构策略的抉择:哈希表与平衡二叉树。
- 哈希表架构: 利用哈希函数将元素映射到连续内存空间(桶)。其主要优势在于极致的性能,提供平均时间复杂度为 的元素添加和成员资格测试操作。然而,哈希策略的致命弱点在于它彻底破坏了元素的内在顺序,无法支持按照值类型规定的顺序进行迭代输出 。
- 平衡二叉树架构: 诸如红黑树或 AVL 树结构。这类结构在各项基础操作上均提供最坏情况下的 性能保障。虽然单次操作的渐进复杂度劣于哈希表,但它保持了严格的节点偏序关系,使得开发有序迭代器成为可能。
基于 Map 构建 Set
在软件架构设计的初期,唐纳德·克努特曾提出:“过早的优化是万恶之源” 。在开发公共接口的初始版本时,最明智的策略是使用已有的、经过充分测试的数据结构来搭建最简可用模型。
既然集合(Set)在逻辑上可以被视为只有键(Key)而没有值(Value)的字典(Map),我们完全可以将 Set 的底层私有成员定义为一个 Map 实例。为了将内存冗余降至最低,映射的值类型可以选取 C++ 中占用空间最小的内置类型 char(仅占用 1 字节),且在实际逻辑中忽略该字符的具体内容 。
头文件 setpriv.h 中的私有成员声明如下:
1 | /* 实例变量 */ |
随后,在 setimpl.cpp 的具体实现中,所有基础的集合操作被直接代理给内部的 map 对象:
1 | template <typename ValueType> |
针对高级的集合代数运算,如判断两个集合是否相等,可以通过子集判断逻辑巧妙实现:只有当集合 A 是集合 B 的子集,同时集合 B 也是集合 A 的子集时,两者才在数学上严格等价。
1 | template <typename ValueType> |
实现集合的并集(operator+)操作同样依赖于底层的迭代机制。若两个集合的比较函数指针不一致,则它们不具备可比性,必须抛出运行时错误。通过复制当前集合并迭代合并目标集合元素,最终返回合并后的快照。获取集合首元素(first())的方法则直接调用底层迭代器的初始位置 begin() 并解引用 。
1 | template <typename ValueType> |
特征向量与字符集合的优化
当集合实现被发布给客户端后,遥测数据可能揭示出某些特定类型的集合被高频调用,值得为其引入专用且复杂的数据结构优化 。在编译器设计或词法扫描器(Scanner)的开发中,经常需要定义一系列由定界符组成的字符集合(Set<char>)。
对于这种值域空间极其有限的数据类型(如仅有 256 个状态的 ASCII 字符集),利用树结构或哈希表将产生灾难性的对象管理开销。计算机科学中应对此类场景的终极解法是采用特征向量(Characteristic Vectors)或称位向量(Bit Vectors) 。
特征向量的深刻洞见在于:对于小整数或字符集,可以使用内存中的单独一个“位(Bit)”来表征元素的存在性状态。状态 1 表示包含,状态 0 表示排除。由于每一个 ASCII 码都可以映射为从 0 到 255 的绝对偏移量,一个包含所有大小写字母的集合,完全可以被压缩进一段仅占用 256 位(即 8 个 32 位机器字长,共 32 字节)的连续内存区块中 。
这种表示方法的巨大性能红利来源于硬件底层的支持。中央处理器(CPU)能够将特征向量的大块位序列载入寄存器中,并利用机器指令级别的按位运算符(Bitwise Operators)执行集合代数计算。这种优化使原本需要成百上千次循环迭代的并、交、差运算,在微秒级时间内即可通过极少数机器指令并发完成 。
以下表格详细列举了 C++ 中的位运算符及其在特征向量集合运算中的应用映射:
| 运算符 | 描述与位级操作行为 | 在特征向量集合代数中的映射意义 |
|---|---|---|
& |
按位与: 对齐的两操作数对应位同为 1,结果位才为 1,否则为 0。 | 集合交集: 只有同时属于两个集合的元素,其特征位才会保留为 1。该技术在底层常被称为掩码(Masking)截取。 |
| |
按位或 : 对齐的两操作数对应位只要有一个为 1,结果位即为 1。 | 集合并集 : 合并两个特征向量,使得出现在任一集合中的元素均被标记。 |
^ |
按位异或: 对齐的两操作数对应位的值不相同,结果位即为 1。 | 集合对称差 : 提取属于集合 A 或属于集合 B,但不同时属于二者的元素。 |
~ |
按位非: 单操作数取反,0 变为 1,1 变为 0。 | 集合的补集: 标记所有未被当前集合涵盖的全集元素。 |
<< |
左移: 所有位整体向左移动,低位补 0。 | 用于快速定位和生成特定元素的特征掩码(如 1 << charValue)。 |
>> |
右移: 所有位整体向右移动(无符号数执行逻辑移位)。 | 用于快速扫描或状态降维。 |
结合上述运算符,我们可以轻而易举地组合出复杂的集合操作。例如,欲计算集合 与集合 的差集(即出现在 中但不属于 的元素),可以通过公式 A & (~B) 实现。首先利用 ~B 计算出不属于 的所有元素的超集特征向量,随后将其与 的特征向量进行 & 掩码计算,过滤出的最终状态序列即为差集的结果 。
布隆过滤器
特征向量通过牺牲值域的普适性,在极其狭窄的空间内实现了极致的性能。然而,在现代工业界,尤其是在搜索引擎、分布式数据库或对等网络(P2P)中,我们需要管理的往往是千万甚至百亿级别、值域几乎无限的复杂元素集合。如果对这种规模的数据建立特征向量,所需的内存将是天文数字;而若使用哈希表等传统数据结构存储原始数据来杜绝误差,内存成本同样令人无法承受 。
正是在这一背景下,Burton H. Bloom 于 1970 年发表了具有划时代意义的论文《Space/Time Trade-offs in Hash Coding with Allowable Errors》。他提出了一种名为布隆过滤器(Bloom Filter)的精妙概率型数据结构。该结构牺牲了少量的准确性(允许极低概率的假阳性误报),换取了对大规模数据集进行成员资格测试时极大的内存压缩效益 。
在 1970 年的原始论文中,Bloom 展示了基于有限哈希区域针对 50 万个单词的拼写检查连字算法分析。下表节选了其论文中展示的布隆过滤器通过引入容许的错误率而节省的大规模磁盘访问性能数据 :
| 容许的错误率 (P) | 哈希区域大小 N (Bits) | 避免的不必要磁盘访问百分比 |
|---|---|---|
| 1/2 | 72,800 | 45.0% |
| 1/4 | 145,600 | 67.5% |
| 1/8 | 218,400 | 78.7% |
| 1/16 | 291,200 | 84.4% |
| 1/32 | 364,000 | 87.2% |
核心架构与机制
布隆过滤器的物理表示极其简单,本质上它是一条初始状态全部为 0 的超长位数组,其长度设定为 。除此之外,系统需要配备 个相互独立的哈希函数集 。这 个函数必须具备高度的随机离散性,确保能将任意输入的复杂元素均匀地映射到 的离散值域索引内 。在实际应用中,为了加速计算并降低 CPU 消耗,现代实现往往利用像 MurmurHash 或 MD5 这样的散列族,并通过加法线性组合(如 )来高效衍生出 个独立索引 。
插入: 当客户端希望将新元素 注入到集合中时,系统会将 分别抛入 个哈希函数中,计算出 个离散的整型索引。随后,系统跳转至位数组中对应的位置,将这 个位置的比特位全部翻转为 1 。由于没有任何机制记录是哪一个具体元素修改了某个特定位置,不同的元素完全可能将同一个比特位重复置为 1(哈希碰撞)。
查询与单向概率约束:当系统需要检验未知元素 是否隶属于该集合时,将以相同的规则对 进行 次哈希映射。
- 绝对排除: 如果在探测过程中,这 个目标索引位置存在任何一个是 0,布隆过滤器就能以绝对确定的数学严谨性宣布元素 不在集合中。因为如果它曾被插入,这 个位置早应在历史操作中全部被置为了 1。这就是布隆过滤器核心保证的无假阴性特征 。
- 概率存在: 反之,如果探测发现 个目标位均已被置为 1,系统只能返回元素 可能在集合中的推测。因为随着集合越来越拥挤,这 个位置有极高概率是由其它若干个不相关元素在历史插入过程中凑巧覆盖的结果。这种将非成员错误判定为成员的情况,即为假阳性或误报现象 。
假阳性率
为了在工程实践中准确驾驭布隆过滤器的失真概率,我们必须在给定的位数组大小 、插入元素总数 与哈希函数个数 之间建立严格的数学方程。假设所有的哈希函数完全独立,且生成的索引分布是绝对均匀的,我们可以通过连续的概率论与极限推演来揭示这一规律 。
空间饱和度状态推演
1. 单次映射后的空闲概率: 在执行一次单独的哈希操作时,位数组中某一个特定的比特位被恰好击中并置为 1 的概率是 。相反,该特定位成功躲过此次修改,维持状态 0 的概率为:
2. 单个元素插入后的空闲概率: 当一个完整的元素被插入时,连续触发了 次独立哈希。这期间该特定位依然没有受到任何波及而保持 0 的概率是:
3. n 个元素饱和后的空闲概率极限近似: 经过 个独特元素的持续轰炸,总共执行了 次映射。该位在这个漫长过程中始终明哲保身、未被污染的精确概率是:
在工业界的大规模参数配置中, 通常是一个极大的数值。根据高等数学中自然对数底数 的极限定义公式 ,我们可以对上述离散概率进行连续化极限近似:
因此,在过滤器吸收了所有 个元素之后,任意一个随机比特位已经被覆盖为状态 1 的期望概率(设为 )可表示为:
假阳性发生概率的闭式解
当系统发起对一个未被收录的新元素 的成员查询时,发生假阳性的前置条件是: 在被 个哈希函数映射后,所指向的 个比特位恰好全都在先前的操作中被翻转为了 1。假设这 个位的状态是互相独立的(尽管这属于一种宏观近似,实际证明表明利用鞅论(Martingale)或 Azuma-Hoeffding 不等式,其偏离期望的界限极小),发生假阳性误判的概率 为 :
通过该核心公式可知,假阳性率呈现出多重非线性约束:位数组 越长,哈希空间越稀疏,错误率越低;承载的数据量 越大,数组越拥挤,错误率越高。然而,最为微妙的参数是哈希函数的数量 ——由于 同时作为底数项中负指数的乘数以及整个表达式的外层指数,其存在一个使其导致错误率函数发生极值逆转的理论最优点 。
寻找最优的哈希数量 k 与对称性极值解析
为了求得在给定 和 时,能将假阳性概率 压至极限的 值,我们可以运用微积分结合数学对称性进行证明 。
首先,令位为 1 的概率 。则我们试图最小化的误报率为:
对等式两侧同时取自然对数:
由前述定义可知,,对其取对数可得 。将此 的表达式代回目标函数中,我们得到一个新的仅关于 的无量纲函数 ,其最小化等价于最小化误报率 :
这是一个具有极高美学对称性的方程。由于负号与常数因子 的存在,极小化 转化为极大化乘积部分 。函数 与 围绕着坐标轴 呈现出完美的镜像对称。通过求解一阶导数 ,唯一的解析驻点确实严格落在 处 。
将 这个临界状态代回到我们对 的关系式中:
两边取对数得出最优哈希函数个数:
结论 蕴含着深邃的信息论启示。当系统配置达到最优化、假阳性率被压榨至底线时,布隆过滤器的位数组中必然是一半比特为 0,一半比特为 1。此时,抛出任何一个索引位,其状态为 0 或 1 的概率严格等分,如同抛一枚绝对公平的硬币。这标志着整个位数组的信息熵达到了绝对的物理上限,系统中没有任何空间浪费和冗余模式,用最致密的信息密度记录了所有的集合成员态 。
将最优 代入最初的误差公式,得到了系统的极致假阳性率底线:
这表明,即便面对任意庞大和复杂的数据元素,只要系统能够保证每个插入对象平均分配到 位的存储空间,就能稳定地提供不到 的误报错误率;分配 位,就能将错误率镇压在千分之一级别以内 。
威斯康星大学的研究者系统性地生成了不同 比例与哈希数量 组合下的假阳性率对比表。以下数据清晰展示了 逼近最优理论值时误报率逼近低谷的动态趋势 :
| 每元素分配位数 (m/n) | 理论最优 k 估值 | k=2 假阳性率 | k=3 假阳性率 | k=4 假阳性率 | k=5 假阳性率 | k=6 假阳性率 | k=8 假阳性率 |
|---|---|---|---|---|---|---|---|
| 4 | 2.77 | 0.155 | 0.147 | 0.160 | - | - | - |
| 6 | 4.16 | 0.0804 | 0.0609 | 0.0561 | 0.0578 | 0.0638 | - |
| 8 | 5.55 | 0.0489 | 0.0306 | 0.0240 | 0.0217 | 0.0216 | 0.0229 |
| 10 | 6.93 | 0.0329 | 0.0174 | 0.0118 | 0.00943 | 0.00844 | 0.00846 |
| 12 | 8.32 | 0.0236 | 0.0108 | 0.00646 | 0.00459 | 0.00371 | 0.00314 |
应用
凭借极其廉价的内存开销与常数级的查询时间,布隆过滤器迅速突破了拼写检查的狭隘范畴,深度渗透到了几乎所有现代分布式存储、缓存共享以及高可用性集群的设计模式之中 。
分布式数据库与 LSM 树索引加速
2006 年,Google 在 OSDI 大会上发表了划时代的论文《Bigtable: A Distributed Storage System for Structured Data》,公开了其用于索引网页、地理信息等 PB 级结构化数据的底层平台架构 。
Bigtable 抛弃了传统关系型数据库臃肿的 B+ 树机制,采用日志结构合并树(Log-Structured Merge-Tree, LSM-Tree)进行数据管理。在这一架构下,高速写入的突变首先被收容于内存态的 MemTable 中。当 MemTable 的容量触及阈值界限时,这批有序的键值记录会被冻结,并持久化到磁盘上生成一个不可变的静态数据块——即 SSTable 文件 。
读放大的灾难与缓解机制: 不可变的 SSTable 极大地推高了系统的写入吞吐量,但却为随后的读取路径埋下了巨大的性能隐患。每当客户端试图锁定某一行的具体状态时,系统不得不全盘遍历所有曾存储过该关键字碎片的散落 SSTable,并在内存中重新执行合并拼装。尤其是当应用程序持续探测根本不存在于数据库中的悬空记录时(例如冷请求、恶意探测或稀疏矩阵中的空白区域),这种行为将迫使底层文件系统发起海量的、极其昂贵的磁盘寻道操作 。
Locality Groups 与 Bloom Filter 的精准拦截: 针对这一被称为读放大(Read Amplification)的结构性病灶,Bigtable 的工程师通过允许客户端为特定的局部性组(Locality Group,一组具有相似访问特征的列族的聚合)关联 Bloom Filter,实现了巧妙的性能突围 。
系统会在后台为每一个 SSTable 提取其内部所有键值对的哈希特征,浓缩生成一个极致精简的布隆过滤器,并将这些过滤器对象全额常驻于对应的 Tablet Server 的物理内存之中。在实际调度任何磁盘 I/O 动作之前,读请求必须先经过这些过滤器的盘问机制:
- 只要该 SSTable 所绑定的布隆过滤器冷酷地反馈“否(No)”,系统即可百分之百确信目标数据绝对未被编入该文件,从而直接放行,彻底阻断无效的磁盘寻址过程。
- 只有当其反馈“也许存在(Yes)”时,系统才会真正下沉至文件系统,触发耗时的底层读取 。 这一微小的内存结构介入,成功地将大规模结构化存储系统的单行读取吞吐能力推向了极致,使其在面对大规模零散或非命中查询时保持着坚如磐石的低延迟特性 。
广域网 Web 缓存协作
除了单点数据的加速过滤,布隆过滤器在降低集群分布式通讯负载方面同样展现出惊人的潜力。在 1998 年左右由 Fan 等人发表的研究成果(后演变为 Squid 代理缓存的 Cache Digests 机制)中,针对Summary Cache(摘要缓存)协议的提出就是这方面的典范 。
在地理隔离的广域网环境中,分布各地的 Web 代理若要试图最大化带宽利用率,就必须互相分享对方已缓存的网页文档清单。若频繁使用旧有的 ICP(Internet Cache Protocol)协议,向每一个兄弟节点广播并发起轮询:“你这有这个 URL 吗?”,随之而来的消息风暴与 CPU 网络堆栈消耗将随着节点数量呈指数级飙升 。
Summary Cache 的革命性方案是,每个代理服务器停止毫无意义的频繁问询,而是利用自身缓存内所有的网页 URL,定时构建一个高信息密度的布隆过滤器摘要矩阵。节点间仅周期性地彼此传输并同步这些浓缩后的微型位数组。此后,每当面临未命中请求时,本节点只需快速翻阅兄弟节点留下的布隆过滤阵列,即可在极低内存开销下即时、单边地做出高度精准的跨域探测判断。实验数据确凿地证明,这套体系成功削减了广域网中 的协议包数量,并规避了绝大部分通信引发的用户延迟 。
布谷鸟过滤器
然而,布隆过滤器的理论模型存在一个致命的缺陷:由于设计中允许多个迥异的元素通过各自的散列路径覆盖到相同的共享比特位,位状态在系统中产生了一种高度纠缠的关联耦合。这导致系统在面临动态数据集时,根本无法提供安全的删除机制。若贸然将某元素映射的几个位从 1 重置回 0,必然会使得共享这些“锚点”的其他无辜数据的查询验证瞬间崩溃,进而打破不可触犯的“无假阴性”底线准则 。
计数布隆过滤器
为突破删除瓶颈,Fan 等人在后期的迭代中妥协地引入了计数布隆过滤器(Counting Bloom Filter, CBF)。CBF 的策略粗暴而直接:它撕裂了原本极致的单位元约束,把每一处单一的“位(Bit)”膨胀替换为了包含多个二进制位的计数器组。 在插入阶段,路径命中的相关桶计数进行累加;在删除阶段,相应的计数器执行递减操作。查询判定则回退为所有受击桶的读数是否均不为零。虽然它表面上修补了功能缺陷,但这使得整个数据结构的容量开销骤增了 倍,且依然无法彻底屏蔽极端计数器溢出的系统隐患 。
布谷鸟过滤器
由于传统的 CBF 带来了难以接受的空间通货膨胀,卡内基梅隆大学的系统研究团队在 2014 年 CoNEXT 顶会上推出了更具颠覆性的替代方案——布谷鸟过滤器,并在多维度上宣告了对 Bloom 模型的超越 。
布谷鸟过滤器彻底摒弃了布隆过滤器的“位数组”模型,采用了基于布谷鸟哈希(Cuckoo Hashing)的封闭式槽位(Bucket)架构。它不再通过多散列覆盖的方式抹杀元素的独立性,而是将元素浓缩为一个极其简短的确定性字节串——指纹(Fingerprint, ),并将该指纹实体塞入哈希表提供的插槽深处 。
这一设计带来了最直接的红利:由于指纹具备了相对清晰的隔离状态,删除操作回归到在特定桶中扫描指纹并直接抹除其物理记录的极简逻辑之中(其复杂度稳定在 ,即搜索桶中条目常数时间),一举解决了 Bloom 的历史顽疾 。
核心难题:部分键布谷鸟哈希 传统布谷鸟哈希能够维持高负载率的奥秘,在于其解决碰撞的 Eviction 机制:当新元素插入时,若备选的两个桶 与 均已客满,它会无情地将桶中原有的寄宿者踢走,霸占巢穴;而那个被放逐的元素,则必须立刻被安置到它的另一个备选映射位置上 。
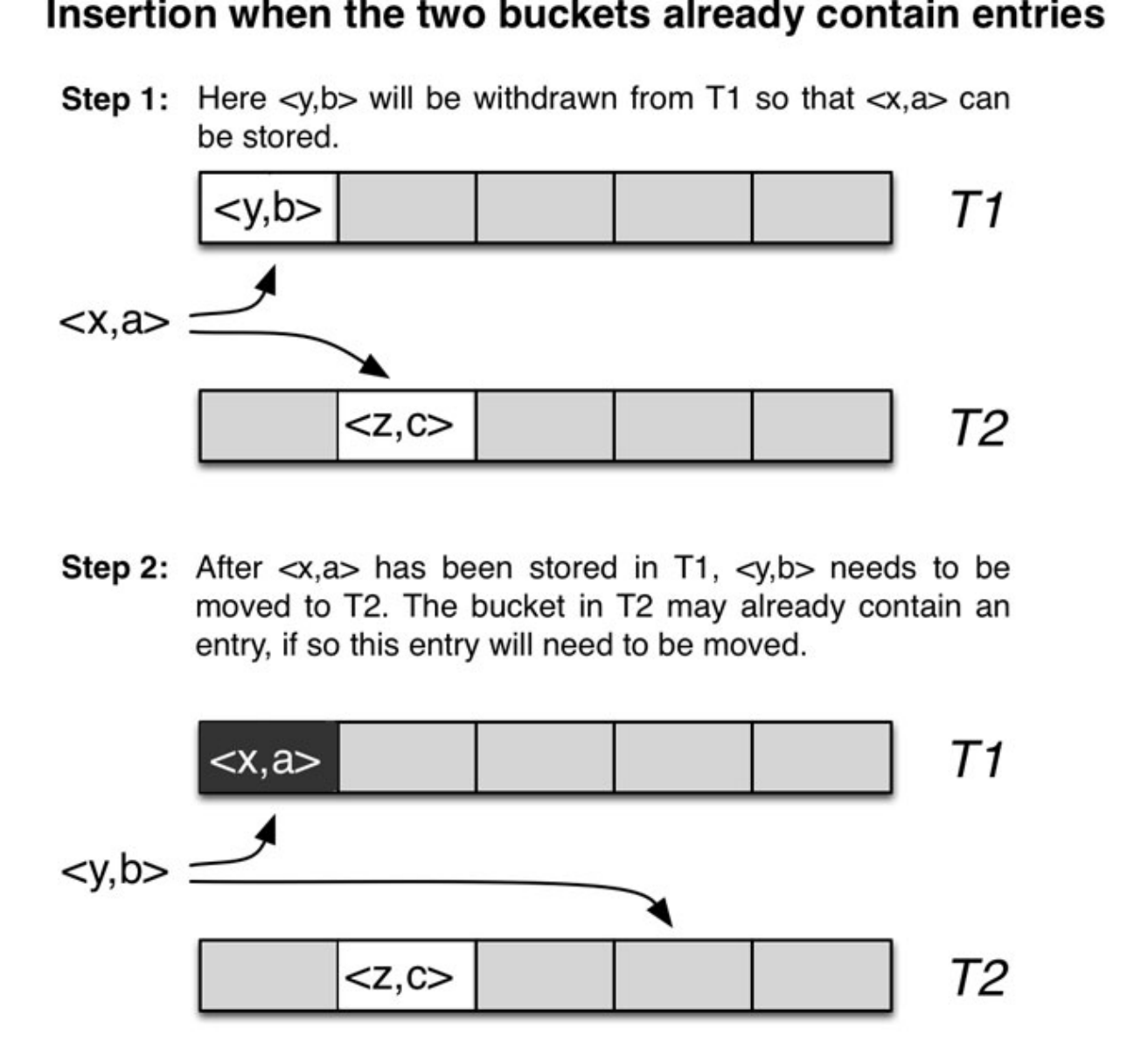
在标准的键值哈希表中,被踢出的对象是完整的原数据 。此时,只需对 再次通过不同规则的哈希器重算,即可获得其另一个去处。但布谷鸟过滤器为了对标 Bloom 的内存极限压缩,内部只保留了残缺的指纹序列 。面对被踢出巢穴的孤立指纹,系统如何逆向推演这枚指纹最初由哪个庞大的原初元素生成,进而又如何获知它应去往何处呢?
卡内基梅隆的团队巧妙地引入了基于异或运算的对称代数属性,设计了部分键布谷鸟哈希公式 : 对于任意输入实体 ,其候选双桶地址计算法则被严格约定为:
在这个表达式体系中,隐藏着极致优雅的数学对偶。由于,系统可以不借助任何先验上下文,直接通过移项来倒推位置:
这意味着,不论当前在发生碰撞时系统操作的桶索引记为 (它可能是 或者是 ),系统只需取出现行位置的槽号,与被剥离出来的孤立指纹自身的再哈希结果相互进行异或,就能自动跳跃到该指纹唯一的平行时空另一侧的备选巢穴 之中 :
这一绝妙设计,斩断了数据迁移对全量数据内容的依赖闭环,让动态重组动作得以仅仅依赖极其微小的内部信息就能维持自我收敛。
指纹防聚集设计机制分析 深入探究上述公式还可以发现,算法在异或前,并未直接将位置与指纹自身相异或(即未使用 ),而是强制叠加了一层 。这绝非画蛇添足。由于指纹长度在空间敏感场景下常被压缩得很短(例如 8 个 Bits),若直接执行异或,其对索引二进制最高位的干扰幅度非常微弱。这会导致指纹一旦被踢出,只能不断在其当前位置(极小半径为 256 的区域内)左冲右突,最终由于陷入死胡同而导致整体数据结构负载崩溃。引入对指纹的雪崩重哈希机制,正是为了让所有被挤出的指纹都能随机散落弹射至全局表中那些深远莫测、尚未利用的空间角落,极大程度消减了局部震荡,使其最高负载率飙升至 。
下表详细对比了布隆过滤器与布谷鸟过滤器在各项工程指标上的综合差异:
| 工程与性能指标维度 | 经典布隆过滤器 | 布谷鸟过滤器 |
|---|---|---|
| 基础数学机制 | 多重哈希位数组覆盖探测 | 带部分键指纹迁移的封闭布谷鸟哈希巢 |
| 单数据位长消耗 | 最优情况下 | |
| 目标 时空间开销 | 效率逐渐落后,空间占用偏高 | 空间压缩极限比 Bloom 结构表现更优异 |
| 内存访存代价与延迟 | 查询必触发 次散落式缓存未命中探测 | 最高仅需探查连续地址的 2 个桶, 局部缓存命中率极高 |
| 数据动态剔除支持 | 完全不可删除(需牺牲几倍冗余引入 CBF) | 完整原生支持常数时间 的定点无损元素擦除功能 |
| 极限负载容量扩充 | 不阻断插入操作,即使饱和也会强制入驻(代价是误报率飙升至 ) | 插入操作表现出刚性上限,当动态连锁踢出数超阀值将引发报错和插入重构重整操作 |